Dostala se mi do rukou havarovaná kvadrokoptéra DJI F320 Phantom 2 Vision+. Dron vinou pilota spadl, nejednalo se tedy o selhání elektroniky.
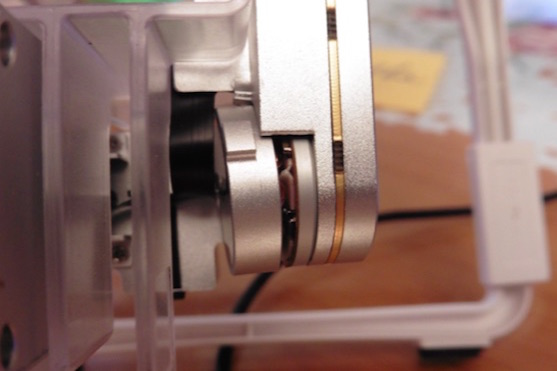
Deformace gimbalu | Zdroj: droncentrum
Již před více jak měsícem, jsem tento stroj zkoušel zkontrolovat. Byl ale přetržený RIBOON kabel (FLEX kabel) kamery DJI Vision+. S majitelem bylo dohodnuto, že kabel objedná a zkusí si jej sám vyměnit.
Tak se i stalo, ale k nápravě nedošlo, a proto mi stroj poslal na celkovou kontrolu. Po pádu se to nesmí podcenit.
Kontrola zapojení kabelů
Prvně jsem zapnul dron a ten naskočil. Gimbal je po pádu (náraz mířil přímo na něj) deformován ve dvou místech a neumožňuje volný chod. Proto se závěs po zapnutí pouze mírně pocukával, ale nešel do vodorovné polohy.
Zkontroloval jsem zapojení flex kabelu majitelem. Na jednom místě byl pojistkou špatně ukotven. Problém však nastal u kabelu vedoucího do kamery. Zde se zřejmě při výměně kabelu podařilo ulomit jednu bočnici, kde se přichytává pojistka. Ta pak zajišťuje přítlak kabelu na kontakt. Toto jsem zjistil po demontáži krytu kamery.
Již před tímto zjištěním mi po připojení ke kameře nenaskočil obraz a viděl jsem také hlášení REMOVE THE GIMBAL CLUMP. To značí, že na gimbalu je ještě aretace a nebo je na něj vyvíjen tlak. Po ztrátě kontaktu s kamerou pak začal gimbal varovně pípat a dioda na základní řídící desce blikat červeně.
Bohužel přitlačit kabel bez řádné pojistky se mi nepodařilo. Proto jsem se rozhodl spíše zkontrolovat Phantom samotný, dát na něj můj gimbal a vyloučit tak závadu i v dronu.
Zkouška funkčnosti dronu
Prvně jsem tedy zapojil k Phantomovi můj gimbal, který je stejný pro obě verzeVision +. Vše fungovalo naprosto v pořádku. Tímto jsem tedy vyloučil chybu Wi-Fi zesilovače v dronu.
Posléze jsem model rozdělal a zkontroloval řádně všechna zapojení. Po pádu se většinou deformuje zapojení v oblasti přijímače.
Na jednom rameni a baterii bylo jasně vidět, kam dále mířil náraz. Místo bylo prohnuté a špatně se dotahovalo. Nicméně výměna trupu zatím není nutná. Spoje drží a nevadí volnému chodu motoru. Časem bych však výměnu doporučil a místo kontroloval.

Odřené rameno po nárazu | Zdroj: droncentrum

Baterie odřená po nárazu | Zdroj: droncentrum
Zjistil jsem, že byl mírně ohnutý kontakt pro zapojení GPS modulu. Opatrně jsem jej narovnal. Další problémy jsem nezjistil. Proto jsem zapojil GPS modul a provedl kontrolu nastavení dronu a pokročilou kalibraci řídící jednotky. To vše pomocí programu Phantom 2 na mém notebooku.

Ohnutý konektor pro GPS | Zdroj: droncentrum
Ohnutý konektor pro GPS
V aplikaci se objevilo hlášení o chybě základní kalibrace. Po pádu zřejmě došlo k rozladění jednotky, a proto jsem provedl ADVANCED kalibraci. Po jejím ukončení bylo již vše v pořádku.
Pro jistotu jsem pak ještě provedl kalibraci vysílače na přijímač v záložce RC. Po těchto úkonech jsem šel model zalétnout včetně testu všech funkcí. A výsledek?
Model po vzletu občas vibroval – lépe řečeno pravý zadní motor. Ten však měl volný chod. Po kontrole polohy vrtulí jsem zjistil, že se po nárazu zdeformovalo rameno, které motor drží. Vrtule mají velký rozdíl oproti sobě. Skoro půl centimetru. Nicméně let jsem provedl a:
- všechny funkce fungují, tedy Course Lock, Home Lock, FAIL SAFE a GO Home
- zápis HP a satelitů proběhl před startem a kalibrací kompasu bez problémů
Doporučení pro majitele:
- vyměnit plastový trup a tím odstranit vibrace
- nahradit havarovaný gimbal s kamerou ekvivalentem, protože oprava by si vyžádala minimálně výměnu jednoho naraženého motorku a výměnu optické desky, kde se ulomil držák pojistky
Video z testu letu:





